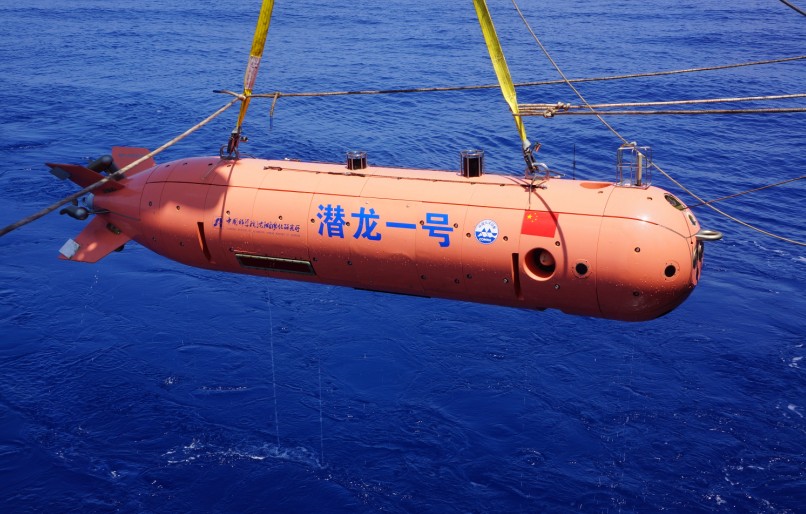
Qianlong-1 unmanned autonomous vehicle performing expeirmental application mission in the Eastern Pacific Ocean (Image provided by SIA)
The unmanned autonomous underwater vehicle (AUV) Qianlong-1 went home after successfully conducting its first experimental application in the Eastern Pacific Ocean on November 6th 2013. On board of the Chinese research vessel Haiyang-6, the vehicle arrived in Guangzhou at 7 a.m. local time.
Co-developed by Shenyang Institute of Automation of the Chinese Academy of Sciences (CAS), Institute of Acoustics of CAS and Harbin Engineering University, etc, Qianlong-1 can travel to a depth of 6,000 meters, and is tasked to explore the sea bed and collect hydrological data. The vehicle is on a trial run and marks the first time a Chinese AUV has been used for a scientific expedition.
Haiyang-6 arrived in the China polymetal nodule province in the Eastern Pacific Ocean on September 30. After a few days’ preparation and pre-tests, Qianlong-1 conducted its first dive on October 6. During the whole experimental application, which ended in October 12, Qianlong-1 finished seven dives, reaching a largest diving depth of 5,162 meters. Altogether, it performed exploration in the polymetal nodule province for nearly 30 hours, providing valuable data for deep-sea resources volume evaluation and exploration.
According to Xu Huixi, who is in charge of the project, and a researcher from SIA, Qianlong-1 shows safe and smooth deployment and retrieval, and its autonomous movement control, high-preciseness underwater positioning as well as detection function proves normal. The experimental application results demonstrate that, researchers have made breakthroughs in key technological issues such as overall integrated technology, deep-sea navigation and position monitoring and control technology, intelligent control technology, deep-sea detection technology, multi-acoustic equipment coordination technology, as well as deployment and retrieval technology, etc.
Source: Autonomous Underwater Vehicle Department, Office of General Affairs
